Point Cloud Object Detection
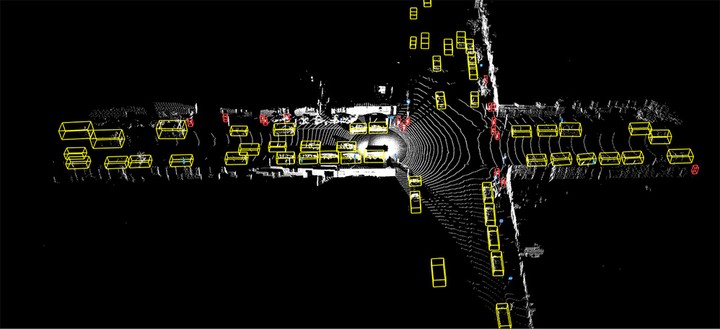
During my internship at Hesai Tech, I worked on the point cloud-based object detection problem. This picture is from Waymo Open Dataset, and I developed several detector with OpenPCDet. One of the challenges is the scale of Waymo Open Dataset (2TB), and I’ve managed to process the whole dataset with a divide and conquer scheme. The focus of my project was to merge the information from multiple frames, so as to raise the overall accuracy of detection. My favorite way is to use ConvLSTM after bird-eye-view compression, where the LSTM would be able to capture temporal information. Nevertheless, the brutal force way is to feed three consecutive frames into the network and supervise the learning process with human-annotated labels. The internship at Hesai was more than a pleasant journey, not only did I learned 3D detection from an engineer’s aspect, I have also made a few valuable friends.