
Hi, I’m Weijiang Xiong (熊伟江), a Ph.D. candidate at École Polytechnique Fédérale de Lausanne (EPFL), Switzerland. I’m associated with the LUTS lab and advised by Prof. Nikolas Geroliminis, I’m also co-advised by Prof. Alexandre Alahi of the VITA lab. My research utilizes massive drone observatory to understand urban transportation systems, including traffic flow patterns, driving behaviors and agent interactions.
Prior to my Ph.D. study, I completed my Master’s degree in Robotics at Aalto University, Finland, with a minor in Machine Learning. I was a summer intern at the Probabilistic Machine Learning Group in 2021, an exchange student at VITA Lab in 2021 Fall, and a Master thesis intern at Nokia in 2022. Before my academic journey in Europe, I obtained my Bachelor’s degree in Mechanical Engineering from Tongji University, China.
🎉 News
2024.08 HiMSNet paper accepted by IEEE-TITS.
2022.01 PoseAct paper accepted by TRISTAN 2022.
2019.10 SASR tracker paper accepted by Signal Processing.
🎓 Education
- 2022.12 - now, Ph.D. in Robotic Systems, EPFL, Switzerland
- 2020.09 - 2022.12, Master in Robotics (minor in Machine Learning), Aalto University, Finland
- 2015.09 - 2020.06, Bachelor in Mechanical Engineering, Tongji University, China
📝 Publications
For a full list of publications, please visit my Google Scholar.
Multi-Source Urban Traffic Flow Forecasting With Drone and Loop Detector Data. Weijiang Xiong, Robert Fonod, Alexandre Alahi, Nikolas Geroliminis. IEEE Transactions on Intelligent Transportation Systems, 2025. Paper Code Dataset
Simple Yet Effective Action Recognition for Autonomous Driving. Weijiang Xiong, Lorenzo Bertoni, Taylor Mordan, Alexandre Alahi. 2022 Triennial Symposium on Transportation Analysis (TRISTAN), 2022. Paper Video Project Code
Surrounding-aware correlation filter for UAV tracking with selective spatial regularization. Changhong Fu, Weijiang Xiong, Fuling Lin, Yufeng Yue. Signal Processing, 2020. Paper Video Code
⚙️ Projects
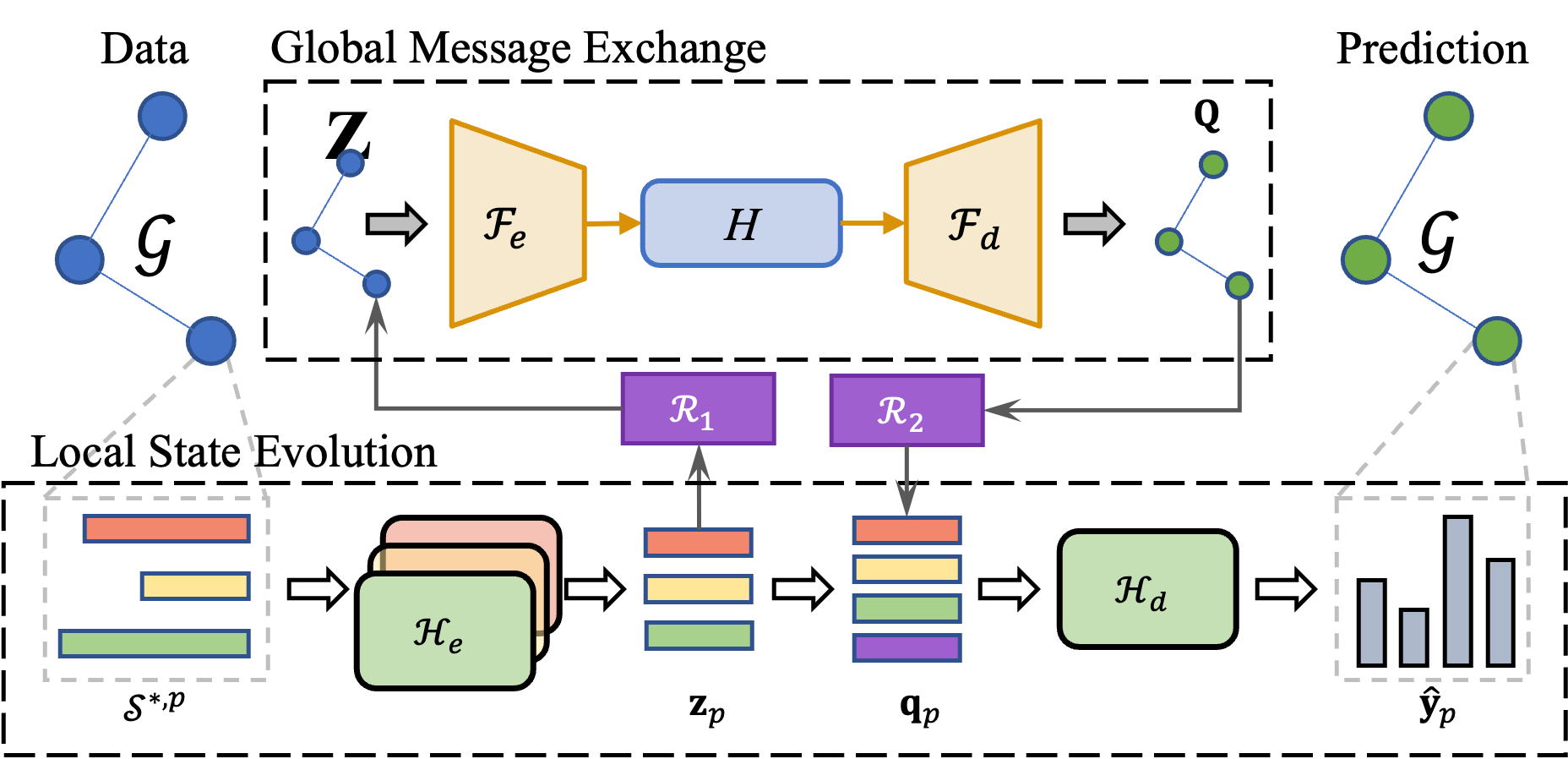
HiMSNet: Hierarchical Multi-Source Urban Traffic Flow Forecasting
HiMSNet is a hierarchical neural network model developed to combine traditional loop detector data and novel drone data for urban traffic flow forecasting. Along with the method, a novel multi-source dataset is created from massive vehicle trajectory data.
Paper accepted at IEEE-TITS.
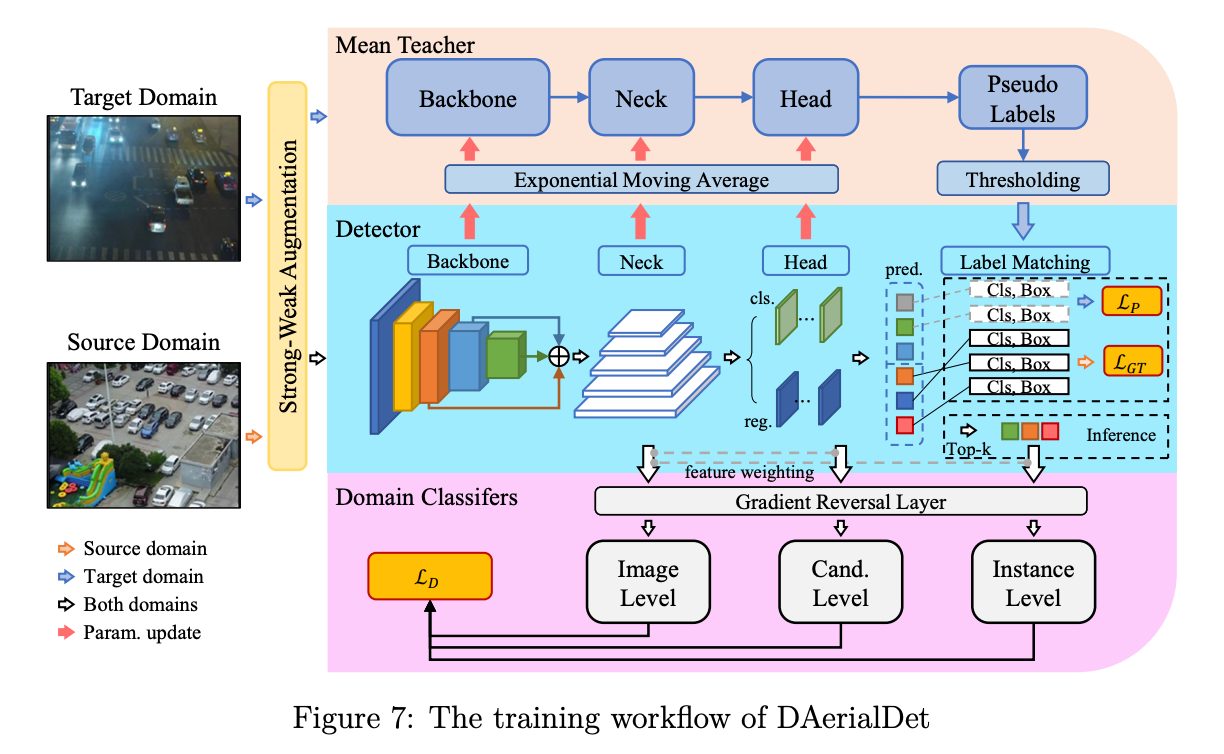
DAerialDet: Domain Adaptive Aerial Object Detection
DAerialDet is a cross-domain generalization method for drone-based object detection. It is built upon an end-to-end anchor-free object detector, and enhanced by feature distribution alignment and knowledge distillation.
Work done at Nokia. [Thesis]

PoseAct: Action Recognition from Human Poses
PoseAct is a light-weight model for recognizing common human actions (e.g., standing, biking, walking) using body poses
Paper accepted at TRISTAN 2022.
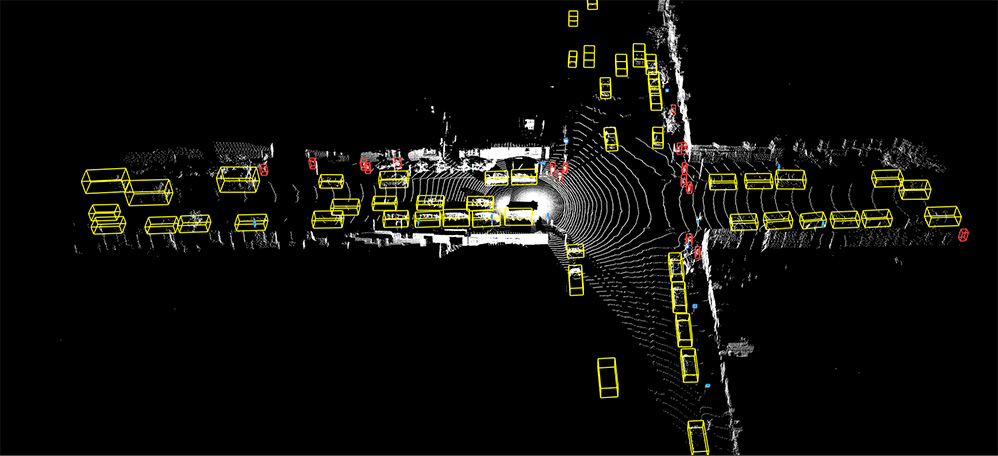
3D Vehicle Detection with Point Cloud
Developed a voxel based 3D vehicle detection method for autonomous driving using the Waymo Open Dataset.
Work done at Hesai Tech.
💻 Internships
2022.03 - 2022.11 Master Thesis Intern Nokia Visual AI Group
2021.06 - 2022.09 Summer Intern at Probabilistic Machine Learning Group, Aalto University
2020.07 - 2020.08 Research Intern at the Algorithm Group of Hesai Tech, Shanghai
📞 Contact
Email: weijiangxiong1998@gmail.com
Whatsapp: +41 76 713 36 30